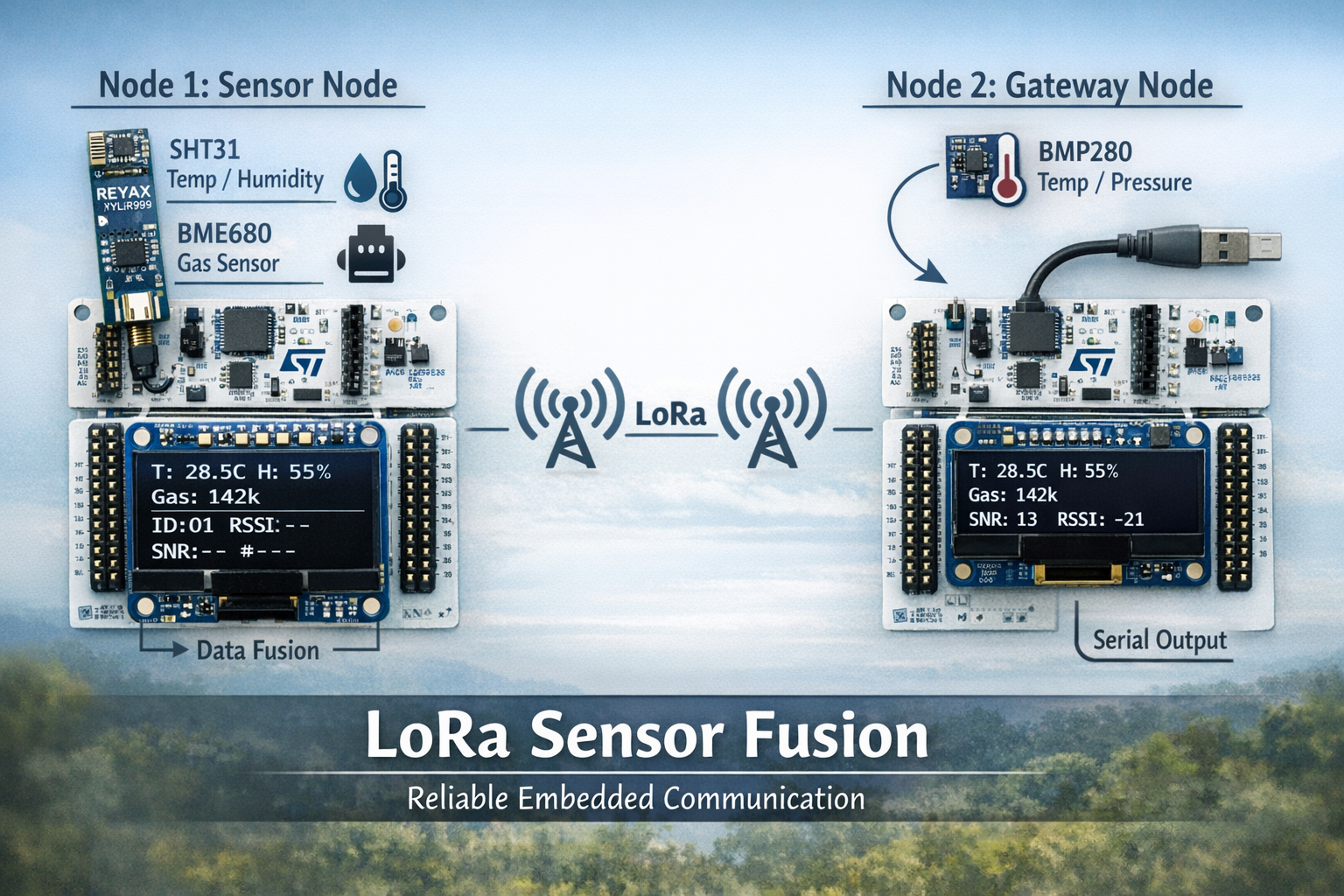
LoRa Sensor Fusion: When "Simple" Becomes Reliable - Wk2
Building a reliable embedded system involves far more than getting code to compile. It’s a process of learning where hardware limits, timing guarantees, and data representation quietly shape everything above them. Week 2 of the Plan focused on making those constraints explicit. The result is a dual-node LoRa sensor fusion system built on the STM32F446RE using Rust and RTIC 1.1 — not as a showcase, but as a foundation. Table of Contents The Objective System Overview Five Critical Lessons Lesson 1: The 51-Byte Myth Lesson 2: UART Timing Lesson 3: Sensor Fusion Lesson 4: Data Representation Lesson 5: Shared Hardware Results Why This Matters Next Steps The Objective The goal for this week was deliberately narrow: ...